
使用 GenManip 简单生成数据
GenManip 的使用非常简单 —— 让我们快速上手,在一个预定义的场景中生成数据。 你只需要做两件事:
- 了解 GenManip 的场景文件结构
- 了解 GenManip 使用的 Config 配置
下载并运行 Isaac Sim
Section titled “下载并运行 Isaac Sim”在 快速开始 部分,我们通过 Miniconda 安装了 Isaac Sim,这样我们就可以直接用 python 命令运行依赖 Isaac Sim 库的程序。
另一种常用方法是使用 Isaac Sim 的二进制安装包。
你可以在这里找到并下载 4.1.0 版本。使用二进制包可以直接启动带有 GUI 的 Isaac Sim 应用程序,这在编辑场景时非常有用。
当然,如果你的目标只是用已有配置生成数据,只需要确保 assets 和 Config 已准备好,然后运行:
python demogen.py -cfg configs/tasks/xxx.ymlpython render.py -cfg configs/tasks/xxx.yml一个典型的工作流程如下:
- 本地使用 GUI 编辑场景,或验证任务是否可行
- 使用
rsync将本地配置文件和资产同步到远程服务器 - 在服务器上运行大规模数据生成任务
下载 Isaac Sim 包后,运行 isaac-sim.selector.sh 并选择默认选项启动 Isaac Sim。
如果你已经下载了一些 GenManip 的资产,进入 GenManip-Sim/saved/assets/scene_usds/debug_scenes/banana_plate_scenes/,双击 base.usda 查看场景。
点击左侧的 Play 按钮开始仿真。你可以通过 Shift + 左键单击 对物体施加力。
⚠️ 退出时请不要保存。
GenManip 的场景文件结构
Section titled “GenManip 的场景文件结构”GenManip 的 Minimal Config 在一个名为 Banana Plate Scene 的简单场景中运行。该场景包括一张桌子、一根香蕉、一个盘子和一台 Franka 机械臂,任务是将香蕉放入盘子中。
打开 .usd(注意不是 .usda)文件可以查看场景的基本结构:
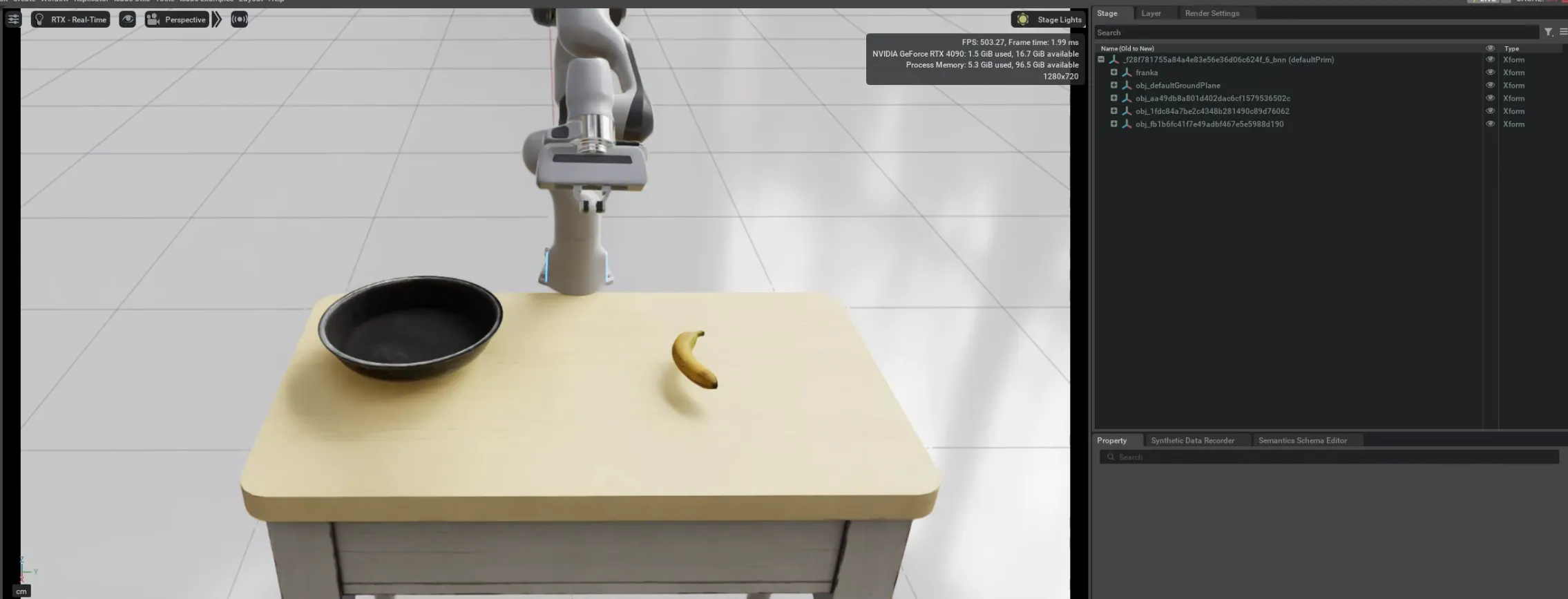
查看右侧的层级结构,你会注意到一个两层结构。最外层是一个 场景 UUID,它的命名可以是任意的。
在该 UUID 下包括多个对象:桌子、香蕉、盘子和 Franka 机械臂。
除了机械臂之外的所有对象命名格式均为 obj_<uid>。obj_ 前缀表示这些对象会被加入 GenManip 的 Object List,并可在 Config 中引用。
如果你使用自己的项目生成了一个场景,且希望用 GenManip 生成数据,请确保将场景重构为这种结构。 如果你是手动搭建场景(我们会在 生成自定义数据 / Benchmark 章节中详细介绍),请务必按照命名规则重命名对象。
GenManip 的 Config 还支持(高级用户常用的方式)基于文件夹或文件名将对象添加到一个空的 .usd 文件中,并根据 Scene Graph 或随机化规则进行布局。这些功能会在 高级数据生成 章节中详细介绍。
GenManip Config 配置
Section titled “GenManip Config 配置”下面是 GenManip 的 Minimal Config 示例。它看起来有点长,但不用担心 —— 几分钟就能完全搞懂:
demonstration_configs:- domain_randomization: cameras: config_path: configs/cameras/fixed_camera.yml type: fixed random_environment: has_wall: false hdr: false robot_base_position: false robot_eepose: false table_texture: false table_type: false wall_texture: false rewrite_instruction: false generation_config: action_path: mode: auto robot: 0 articulation: [] goal: - - obj1_uid: - '0' obj2_uid: - '1' position: - top fixed_position: true allow_fixed_grasp: true force_fixed_grasp: true mode: manual planner: curobo instruction: put the banana on the top of the vintage rusty frying pan. layout_config: ignored_objects: [] type: None mode: manual num_episode: 10 object_config: '0': type: existed_object uid_list: - fb1b6fc41f7e49adbf467e5e5988d190 '1': type: existed_object uid_list: - 1fdc84a7be2c4348b281490c89d76062 preprocess_config: - config: config: default type: convexDecomposition type: collider - type: ccd robots: - config: gripper_type: panda_hand type: franka table_uid: aa49db8a801d402dac6cf1579536502c task_name: Banana/banana_plate_4035_none-wow-wot-woh-now usd_name: scene_usds/debug_scenes/banana_plate_scenes/baseevaluation_configs:- domain_randomization: cameras: config_path: configs/cameras/fixed_camera.yml type: fixed random_environment: has_wall: false hdr: false robot_base_position: false robot_eepose: false table_texture: false table_type: false wall_texture: false rewrite_instruction: false generation_config: action_path: mode: auto robot: 0 articulation: [] goal: - - obj1_uid: - '0' obj2_uid: - '1' position: - top fixed_position: true allow_fixed_grasp: true force_fixed_grasp: true mode: manual planner: curobo instruction: put the banana on the top of the vintage rusty frying pan. layout_config: ignored_objects: [] type: None mode: manual num_test: 10 object_config: '0': type: existed_object uid_list: - fb1b6fc41f7e49adbf467e5e5988d190 '1': type: existed_object uid_list: - 1fdc84a7be2c4348b281490c89d76062 preprocess_config: - config: config: default type: convexDecomposition type: collider robots: - config: gripper_type: panda_hand type: franka table_uid: aa49db8a801d402dac6cf1579536502c task_name: Banana/banana_plate_4035_none-wow-wot-woh-now usd_name: scene_usds/debug_scenes/banana_plate_scenes/base由于 YAML 语法有时不太直观,你也可以将其转换为 JSON 格式来理解。GenManip 同时支持 JSON 作为配置文件格式。
这里我们看到两个主要部分:demonstration_configs 和 evaluation_configs。
它们各自包含一个字典,除了 num_episode 和 num_test 字段不同(分别控制生成数据的数量和测试集的数量)外,其余几乎完全一致。
GenManip 支持在同一个程序中顺序运行多个数据生成或评估任务。这也是它们被组织为列表的原因。从功能上看,它等价于多次运行不同的 Config,但更为方便。
我们先聚焦 demonstration_configs 中的单个字典,来理解其结构。它包含 domain_randomization、generation_config、layout_config、object_config 等部分,下面我们逐一解释。
Domain Randomization(域随机化)
Section titled “Domain Randomization(域随机化)”Domain Randomization 部分用于随机化相机、环境、机械臂、桌子、墙面等元素。
大多数条目在最小配置中都是 false(禁用)。我们会在 高级数据生成 章节中详细讲解这些选项。
其中最重要的是相机配置,它通过相对路径引用一个单独的配置文件。
Generation Config(生成配置)
Section titled “Generation Config(生成配置)”Generation Config 定义了任务生成的各种参数。
其中最核心的是 Goal,它通过 Scene Graph 定义目标布局,当前主要用于描述 Pick-and-Place 任务。
goal 是一个嵌套列表:
- 外层列表表示逻辑 OR
- 内层列表表示逻辑 AND
例如:
[[{banana → left of plate}], [{banana → right of plate}]]表示香蕉可以放在盘子的左边 或 右边[[{banana → left of plate}, {cup → right of plate}]]表示香蕉必须在左边并且杯子必须在右边
每个目标项包含 obj1_uid、obj2_uid 和 position,表示 obj1 应相对于 obj2 放在指定位置。
抓取姿态通常由 AnyGrasp 服务器 提供(详见 安装 AnyGrasp)。
但如果启用了 allow_fixed_grasp 和 force_fixed_grasp,GenManip 会直接从物体的网格和位置计算一个俯视抓取姿态。
同样,fixed_position 会将目标位置约束为 obj2 的中心。
最简形式只需要提供 obj1_uid、obj2_uid 和 position,GenManip 会向 AnyGrasp 请求一个随机抓取姿态,并将物体放置在符合目标要求的随机位置。
- Action Path:通常设为
auto,robot: 0。GenManip 会自动根据目标推断动作序列。 - articulation、mode 和 planner:建议保持默认。虽然之前支持
mplib,但curobo性能更佳,目前已作为默认选项。
Layout Config(布局配置)
Section titled “Layout Config(布局配置)”此部分定义与布局相关的配置。
在最小配置中,它被设置为 None,表示保留场景文件中的布局,不进行随机化。
更高级的布局选项将在后续介绍。
Object Config(对象配置)
Section titled “Object Config(对象配置)”Object Config 部分将 元对象 映射到实际场景对象。
在上述示例中,有两个对象(0 和 1),类型均为 existed_object。
它们对应的路径为:
/scene_uid/obj_fb1b6fc41f7e49adbf467e5e5988d190/scene_uid/obj_1fdc84a7be2c4348b281490c89d76062
这些 ID 与 Goal 部分中引用的对象相对应。
这种设计让数据生成的 scaling up(规模扩展) 变得非常容易。 例如,将配置改为:
"0": filter_rule: [] max_cached_num: 50 option: [] path: object_usds/objects type: load_object_from_path"1": filter_rule: [] max_cached_num: 50 option: [] path: object_usds/containers type: load_object_from_path即可从两个文件夹中各加载 50 个对象和 50 个容器。 在每次数据生成时,系统会随机激活一对物体,执行“将物体放入容器”的任务,其他部分的配置保持不变。
详细内容会在 高级数据生成 章节中介绍。
其他常见字段包括:
- instruction:任务描述
- num_episode:数据集大小
- preprocess_config:预处理步骤,默认通常为
None。若手动构建场景,可以借助它自动配置物理属性(见 生成自定义数据 / Benchmark) - robots:机械臂配置,默认是带 Panda hand 夹爪的 Franka
- usd_name:场景文件相对于
saved/assets的路径 - table_uid:场景中桌子的 UID。GenManip 当前版本主要聚焦于桌面操作,但也支持多桌面或无桌面场景(详见 高级数据生成)
生成的数据将保存于:
- Planning 阶段数据:
saved/demonstrations/<task_name>/trajectory - Rendering 阶段数据:
saved/demonstrations/<task_name>/render
理解了 GenManip 的 Config 结构后,剩下的就非常简单了。 对于基于手动搭建场景的数据生成任务,只需对最小配置进行如下修改即可:
-
手动编辑场景,确保对象名称符合 GenManip 的命名规范。
-
修改以下配置字段:
task_name:任务名称usd_name:场景文件相对路径table_uid:桌子 UIDinstruction:任务描述
-
设置
num_episode为所需的数据量。 -
更新
object_config以匹配场景中的对象。0和1对应任务涉及的两个物体。- 你还可以在 Goal 列表中添加更多目标,以创建长时间序列任务或具有多个成功条件的任务(详见 高级数据生成)。
-
运行以下命令生成数据:
Terminal window python demogen.py -cfg configs/tasks/xxx.ymlpython render.py -cfg configs/tasks/xxx.yml
在下一章节,我们将提供更详细的说明,并附带一个演示视频,展示如何在 5 分钟内生成一个数据集或测试集。